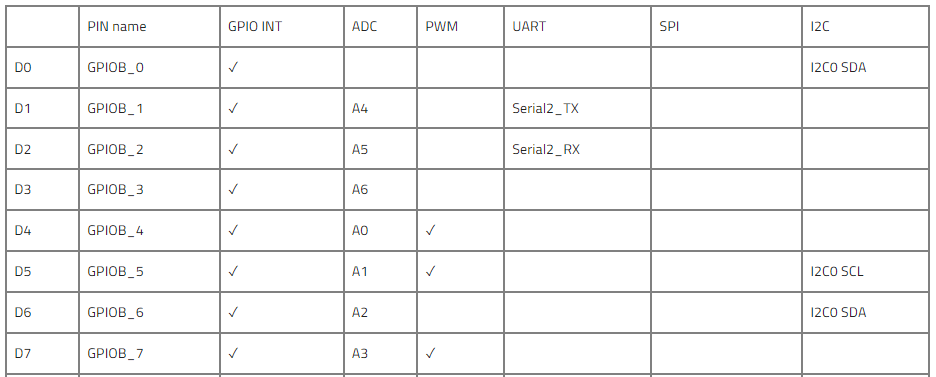
可以查看每個 Ameba 開發板的”入門指南”頁面,透過 Ameba ARDUINO 查看引腳圖
[AMB21/22] 參考連結
[AMB23] 參考 連結
[BW16] 參考 連結
[AMB01] 參考連結
[AMB21/22] 參考連結
[AMB23] 參考 連結
[BW16] 參考 連結
[AMB01] 參考連結
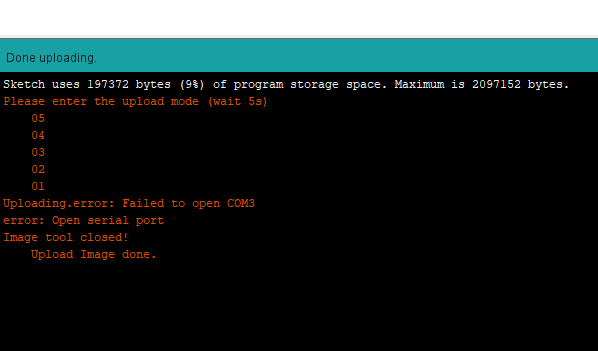
首先,打開串行監視器並進入下載模式。 如果有成功進入下載模式,將在串行監視器中看到”#Flash Download Start”。
是一樣的,都是將bin文件燒錄到Ameba開發板中。
他們使用相同的芯片,但是PCB 的尺寸不同,並提供不同數量的引腳和功能。
AMB21/22 沒有任何用戶可配置的按鈕和 LED。
AMB23 有 1 個用戶可配置的按鈕和 2 個用戶可配置的 LED。
兩個都支持 BLE 5.0。不支持Classic藍牙 (BR/EDR)。
AMB21/22 和 AMB23 可以作為 BLE Central 或 BLE Peripheral 設備運行。
不,標有”NC”的那些沒有連接到任何引腳,因此無法使用。
AMB21 和 AMB23 支持雙頻 2.4G + 5G WiFi。 AMB22 僅支持單頻 2.4G WiFi。
按住 UART DOWNLOAD 按鈕。 然後按下 RESET 按鈕並放開 UART DOWNLOAD 和 RESET 按鈕。
請確保天線連接正確。並檢查您的程式碼以獲取正確的藍牙配置。
可以嘗試使用 printf 和 Serial.print 語法來檢查您的程序。 如果問題仍然存在,可以在 論壇 尋求幫助。
開發板默認配置為 115200 baud rate,請檢查您的串口是否配置為 115200。
RTL8722CSM/RTL8722DM 的默認天線使用 I-Pex 連接器。 請更換/連接 I-Pex 連接器天線。
請確保電阻 R43 旁邊的連接器 J38 已連接。 連接器用於將電源連接到 IC。
當綠色 LED 閃爍時,表示該開發板正在等待下載模式。 當紅色 LED 閃爍時,表示正在將代碼下載到板子上。
不需要。您只需連接它當使用板載 USB 上傳到 BW16。

BW16 有 1 個用戶可配置的 RGB LED。
要在 AMB01 上使用 NFC 功能,需要先將 NFC 天線焊接在板上。 有關詳細信息,請參閱 NFC 範例。
取決於您打算使用的 SDK 和 IDE,您可以查看 這裡並根據您使用的 Ameba 開發板參考”入門指南”頁面。
使用任何終端工具,例如 SecureCRT/teraterm/putty 等。
檢查 json 連結是否已添加到 Arduino IDE 中的“Preferences”(從每個 Ameba 開發板的“入門指南”頁面中找到相應的 json 連結)。
如果在Arduino IDE的“Boards Manager”中仍然找不到Ameba開發板,可以從這裡 下載離線包 。
如果在Arduino IDE的“Boards Manager”中仍然找不到Ameba開發板,可以從這裡 下載離線包 。
設置端口baud rate,需要和 ino 文件中設置的baud rate一致。 例如,“Serial.begin(9600);”
您可以通過點擊在 Arduino IDE 的右上角找到串行監視器 
您可以在 “Tool” -> “Serial Plotter” 中找到它。
不用,因為上傳命令包括編譯和上傳。
添加文件的快捷鍵是“Ctrl+Shift+N”並重命名相應的文件。
從 Github 下載libraries並按照 https://docs.arduino.cc/software/ide-v1/tutorials/installing-libraries 安裝。
首先,請嘗試 Arduino 網站上的說明 https:// docs.arduino.cc/software/ide-v1/tutorials/Linux。
如果之後仍然遇到同樣的問題,請卸載 IDE,然後在 Arduino IDE 根目錄下使用終端重新安裝,並在終端中鍵入以下命令:sudo ./install.sh
如果之後仍然遇到同樣的問題,請卸載 IDE,然後在 Arduino IDE 根目錄下使用終端重新安裝,並在終端中鍵入以下命令:sudo ./install.sh

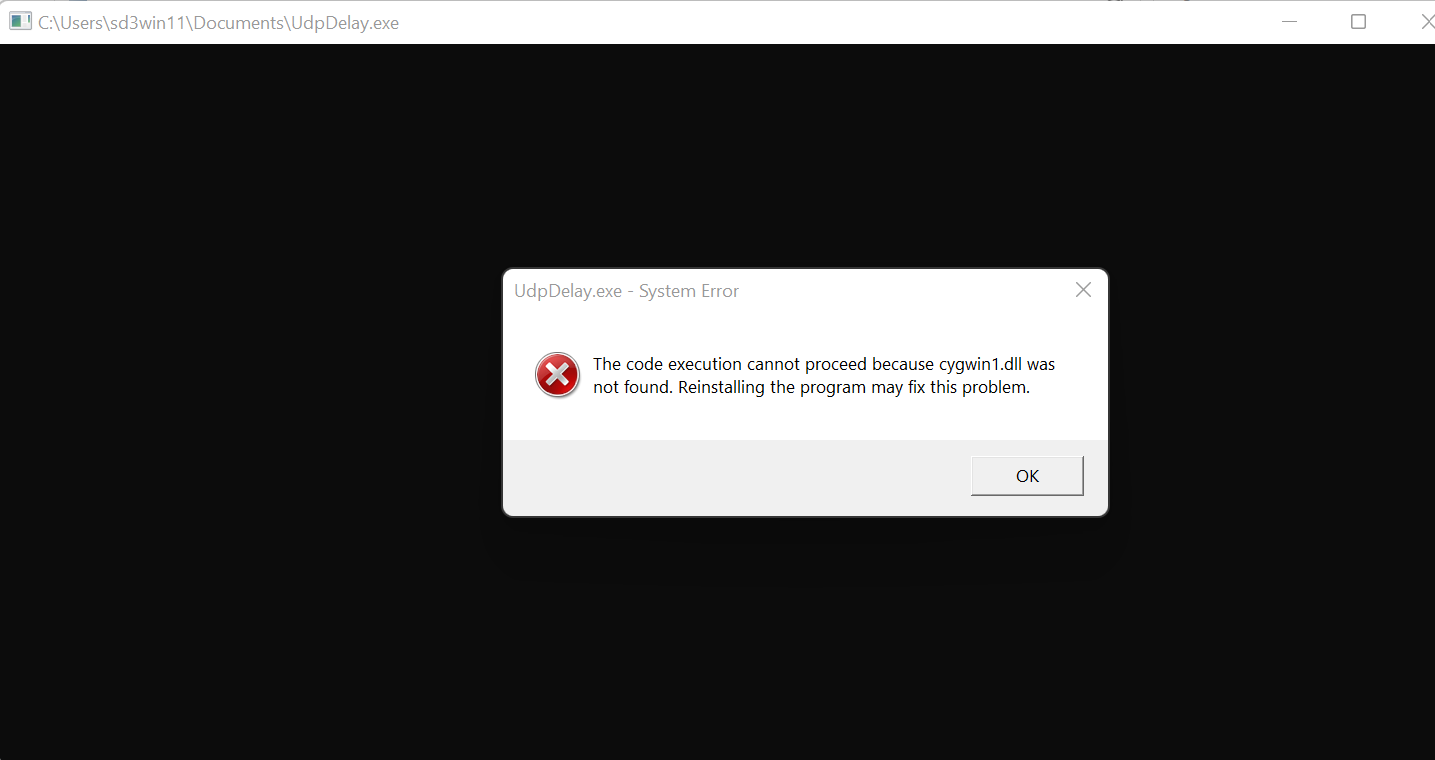 在C槽查找cygwin資料夾,然後在bin文件夾中查找cygwin1.dll,將cygwin1.dll添加到“C:\windows”目錄下。
在C槽查找cygwin資料夾,然後在bin文件夾中查找cygwin1.dll,將cygwin1.dll添加到“C:\windows”目錄下。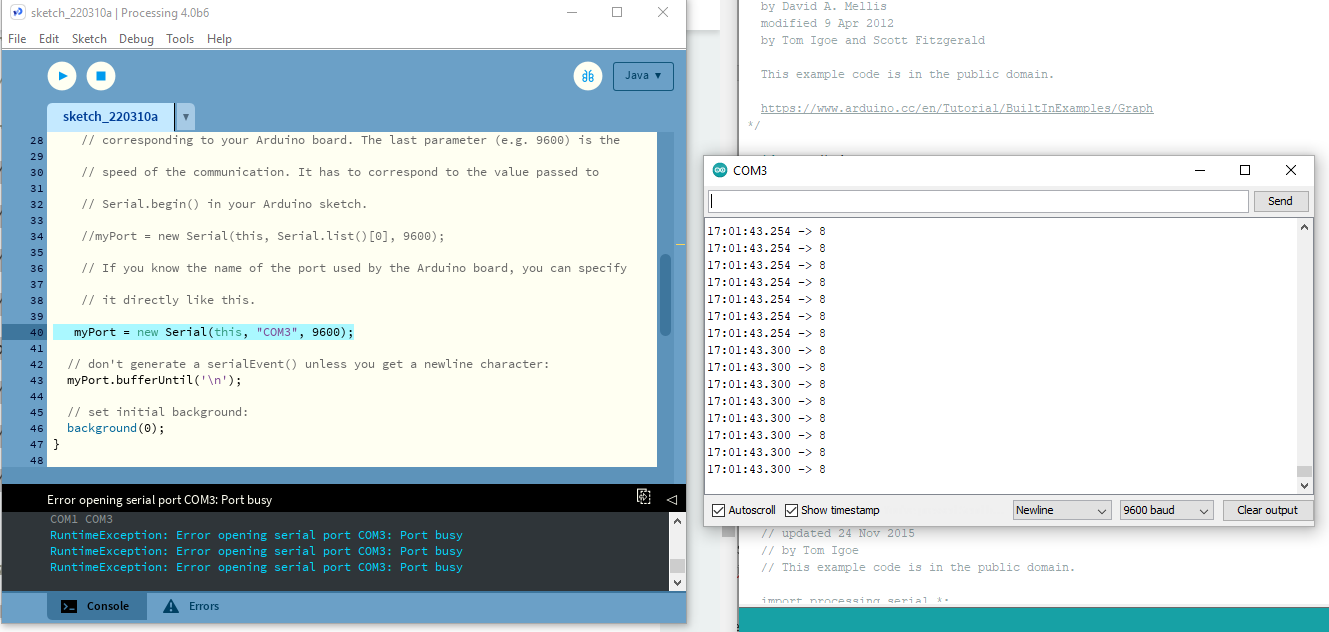 同時只有 1 個串行監視器可以訪問 1 個特定的 COM 端口。 在上面的範例中,有兩個串行監視器試圖打開同一個 COM 端口。
同時只有 1 個串行監視器可以訪問 1 個特定的 COM 端口。 在上面的範例中,有兩個串行監視器試圖打開同一個 COM 端口。建議連接到與電腦相同的網絡。
按照 連結上“入門指南”中的範例進行操作
可以,但是接線與使用 Arduino Uno 不同。 建議參考正在使用的板子的引腳圖。
D7 在 AMB21/22 上是 NC。 NC 是“Not Connected。
確保您的藍牙和定位服務都已打開。
請從 here 安裝補丁和必要的 Arduino 庫。 安裝說明可以在readme文件中找到。
您的電腦和開發板上應使用相同的網絡。